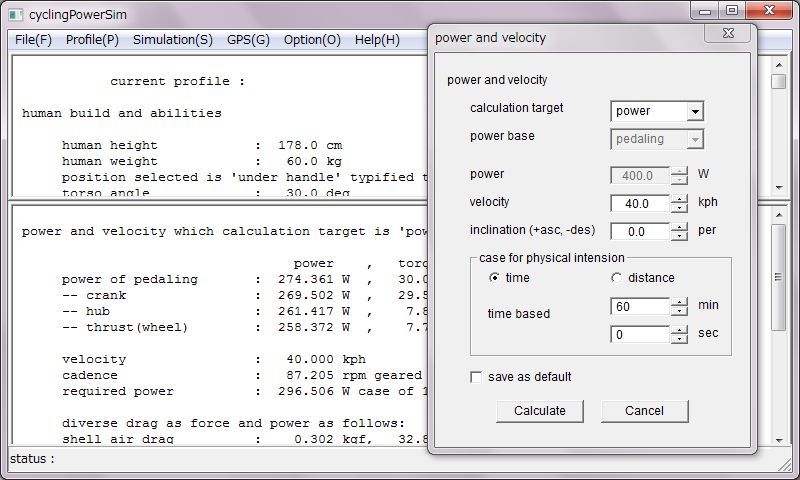
It calculates velocity due to power, and calculates required power due to velocity.
Case of calculation velocity i.e. refered power, it could be selected a power base as pedaling or crank, sprocket, thrust. Thrust based means power based on ground plane of tyre.
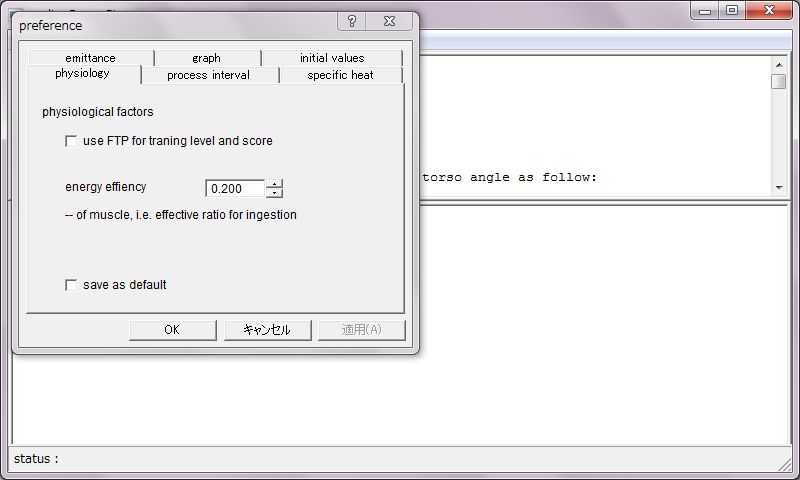
Selects time or distance, it calculates energy calorie which depends on the enegy efficient set in profile.
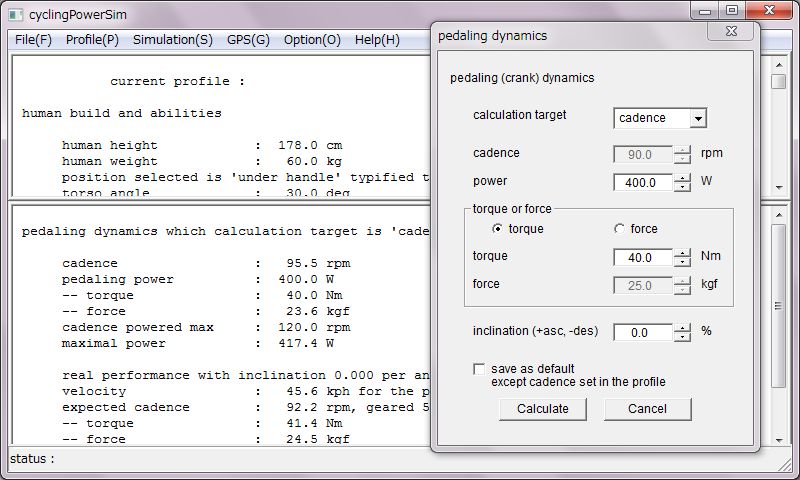
There are some factors calculated except the target factor.
Power and torque, force would be calculated based on pedaling and crank, sprocket, thrust.
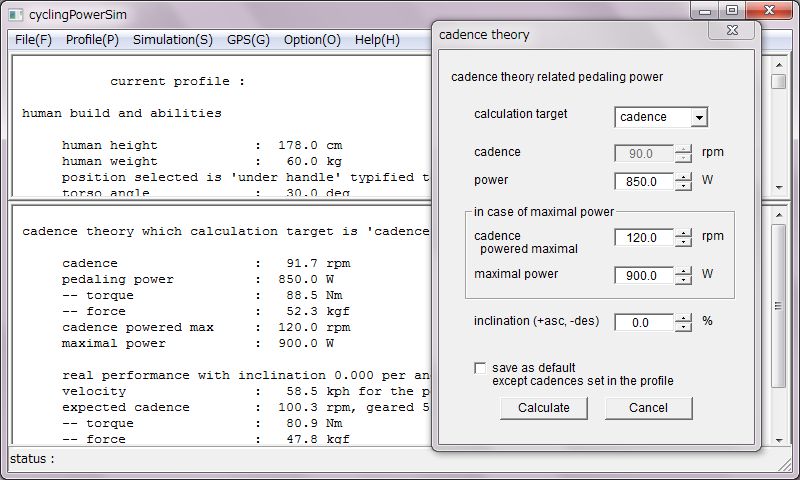
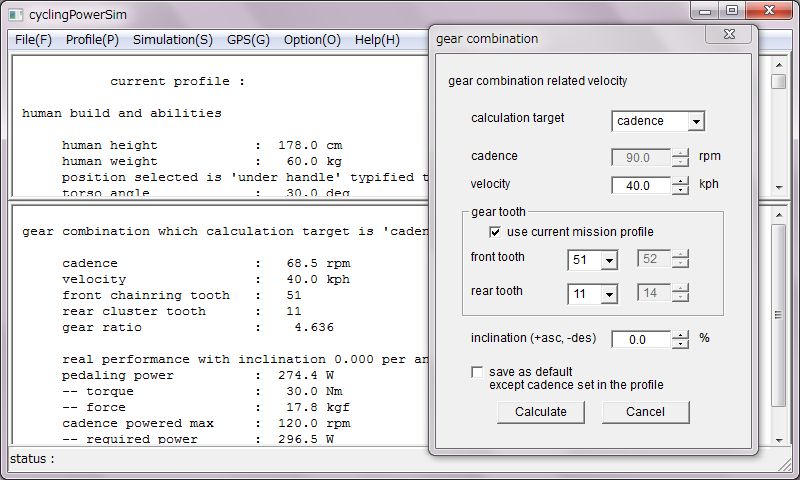
Closed cadence to the usual cadence by gear combinations, required maximum power would be calculated.
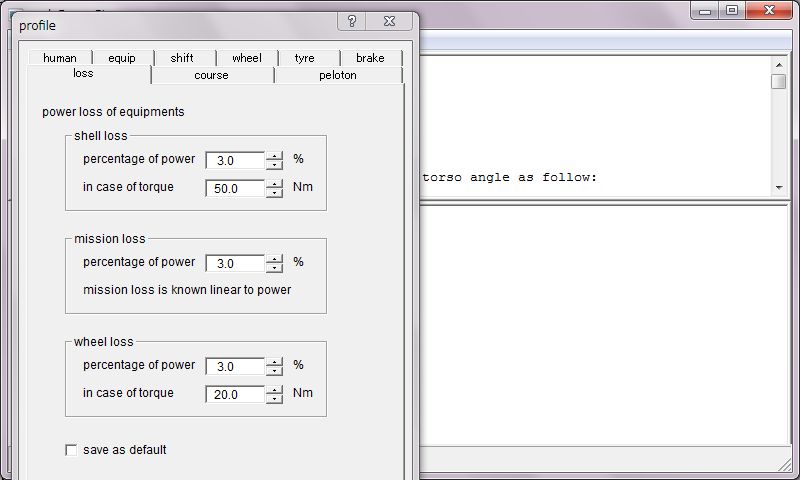
Air resistance and rolling resistance, gravity resistance would be calculated which are consisted to thrust power. As for air resistance, human body and shell resistance, wheel resistance would be calculated. Those are calculated and be expressed as power and force.
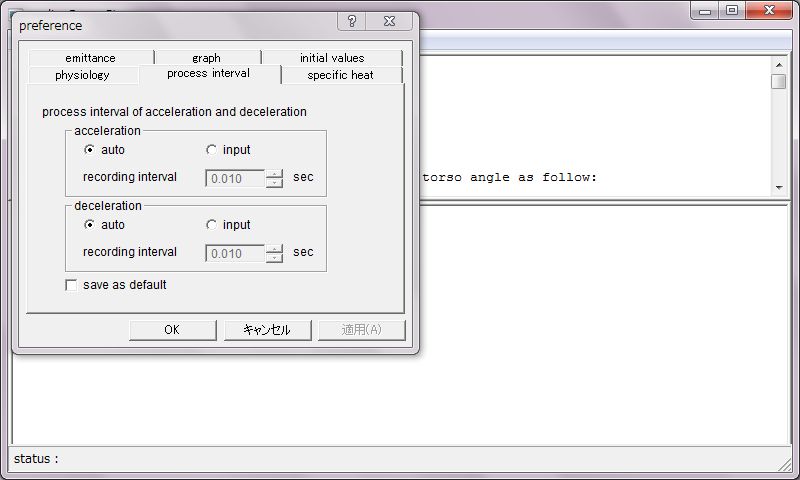
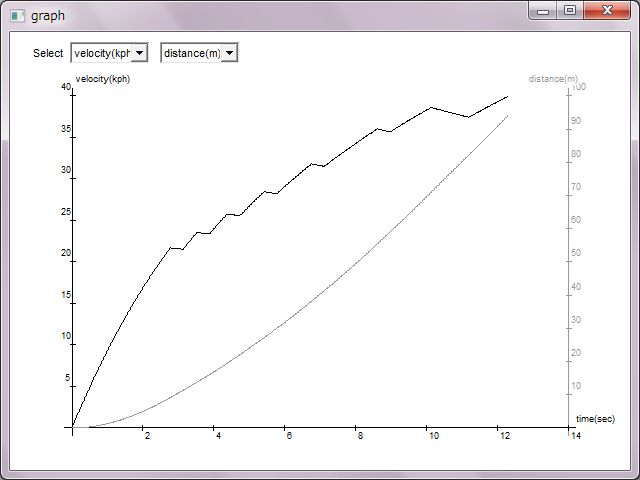
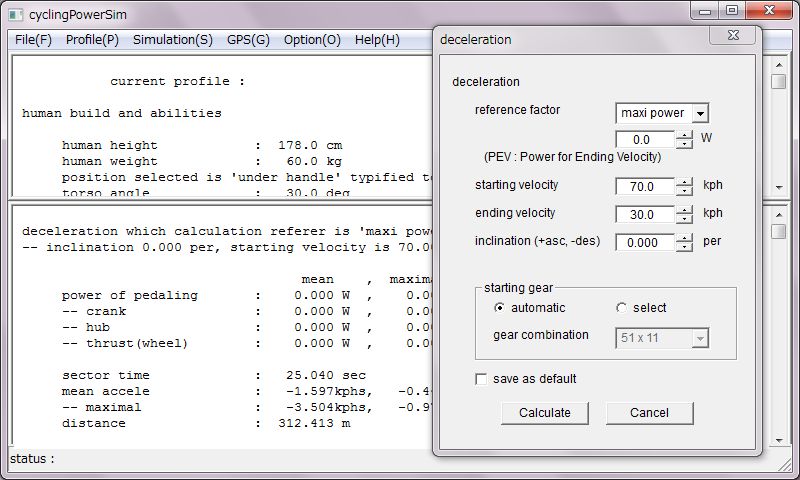
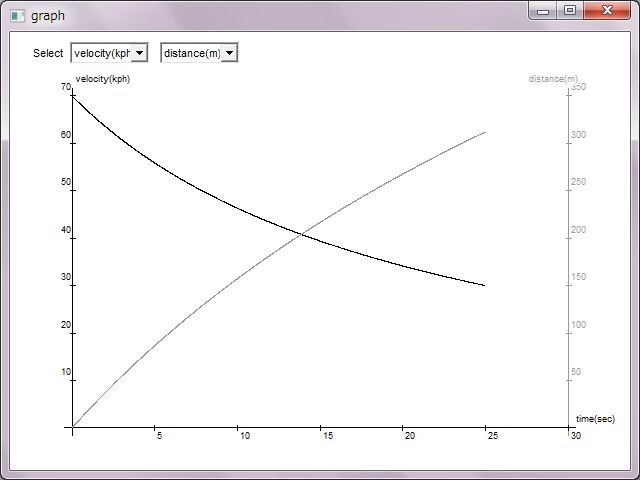
Acceleration, it simulates time sequence motion till ending velocity from initial velocity due to reference factor selected as power or time, distance, accel. It expresses much factors by time sequence. In case of short power as example it will stop to simulate in the process. Also a graph of time sequence could be expressed.
A reference factor selected is one of maximum power or mean power, PFV(Power of Final Velocity) as maximum power, PFV as mean power, sector time, distance, accel, accel as gravity, constant power.
Constant power refered is not realistic which is adopted in passing.
Initial kick time would be enabled for zero velocity starting only. Usually in case of zero velocity starting, it's difficult to bring large power by low cadence pedaling. And some momentum would be made by boot out kicking or waving upper body backward and forward, which manage to raise cadence even if only slightly. It simulates to smooth power curve in low cadence in the initial kick time.
Gears at starting could be selected to be optimized automatically or to assign arbitrary.
There are some factors calculated and expressed.
Mean Power and maximum power, mean torque, mean force would be calculated on based as pedaling and crank, sprocket, thrust respectively.
Required maximum power and sector time, mean accel, maximum accel, distance would be calculated.
Energy calories would be calculated.
In time sequence, time and velocity, power, torque, force, accel, distance, gears, gear ratio, cadence would be calculated and be expressed. Power and torque, force are based on pedaling.
It simulates shift-up at the time of cadence reached to "cadence shift-up" set in the profile, simulates no power during "shifting time loss" set in the profile.
Same scheme as the acceleration. It simulates till ending velocity from starting velocity due to the reference factor selected. It doesn't matter positive or minor power in case selected as a reference factor. Case of minor power it simulates braking normally due to convert power to force. Also graph of time sequence could be expressed.
A reference factor could be selected is one of maximum power and mean power, PFV(Power of Final Velocity) as maximum power, sector time, distance, accel, gravity accel, constant power.
Constant power is not so realistic.
Gears at starting could be selected to be optimized automatically or to assign arbitrary. As a matter that is ignored case of zero power and under.
Braking due to minor power would be simulated due to convert power to constant force.
There are some factors calculated and expressed.
Mean power and maximum power, mean torque, mean force would be calculated based on pedaling and crank, sprocket, thrust respectively.
Sector time and mean accel, maximum accel, distance would be calculated.
In time sequence, time and velocity, power, torque, force, accel, distance, gears, gear ratio, cadence would be calculated and be expressed. Power and torque, force are based on pedaling.
Case of plus power, it simulates shift-down at the time of cadence reached to "cadence shift-down" set in the profile, simulates no power during "shifting time loss" set in the profile.
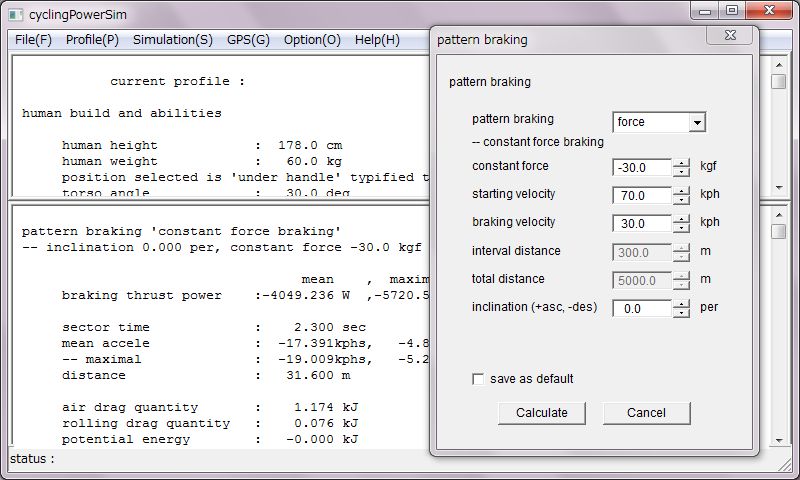
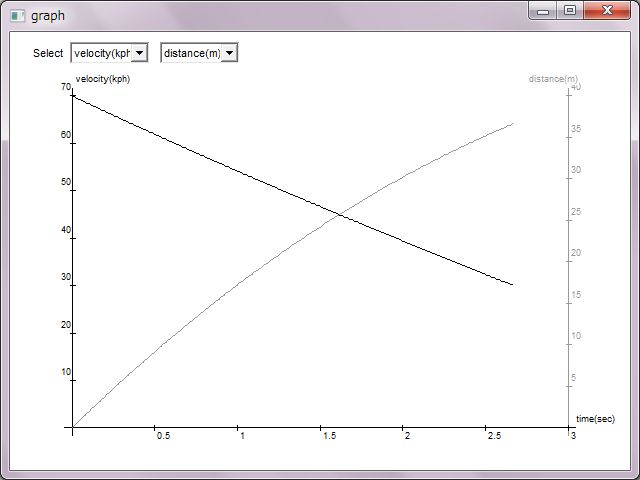
Simulates braking as four pattern based force. Braking due to constant force till ending velocity from initial velocity, critical braking, constant braking for constant velocity on downslope, intermittent braking to certain velocity for every certain distance on downslope. It expresses much factors by time sequence. Also a graph of time sequence could be expressed.
Factors should be set are different for four patterns.
As forconstant force, it simulates till ending velocity from starting velocity. Please set minor value for the force.
Critical braking simulates full braking. Factors should be set are initial velocity and ending velocity only.
Braking for constant velocity, it simulates crusing with constant velocity by braking. It calculates heating of brake in time sequence due to set total distance.
Intermittent braking, it simulates full braking to the velocity set for every interval distance. It calculates heating of brake in time sequence due to set total distance.
Constant force braking and critical braking calculate and express as follows:
As the thrust which is powered on ground plane of tyre, mean braking power and maximum braking power, mean torque, mean force would be calculated and be expressed.
Sector time and mean accel, maximum accel, distance would be calculated and be expressed.
Energies comsumed by air resitance and rolling resistance, potential energy, kinetic nergies both of initial velocity and ending velocity would be calculated and be expressed.
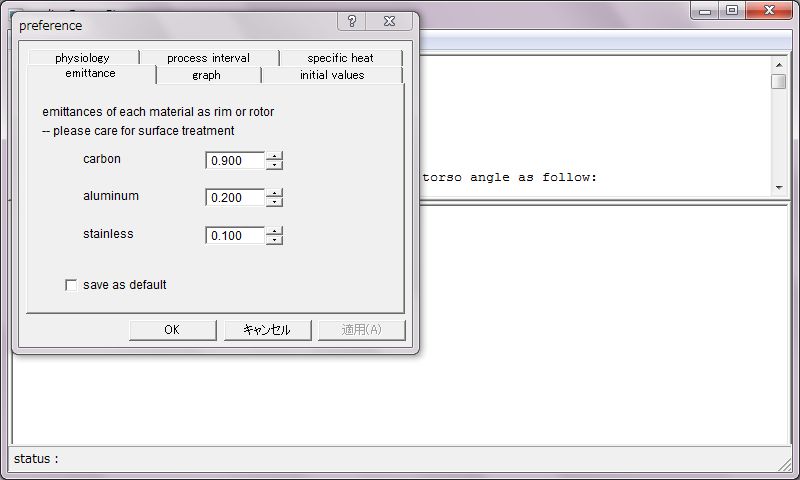
Temperatures and heat values, radiation heats, residual heats both of front and rear brakes would be calculated and be expressed.
In time sequence, time and velocity, power, torque, force, accel, distance would be calculated and be expressed. Power and torque, force are based on thrust.
Braking for constant velocity calculates and expresses as follows:
At first, it calculates braking force, and calculates sector time for total distance.
Energies comsumed by air resitance and rolling resistance, potential energy, kinetic nergies both of initial velocity and ending velocity would be calculated and be expressed.
Temperatures and heat values, radiation heats, residual heats both of front and rear brakes would be calculated and be expressed.
Case of braking for constant velocity, time sequence is not calculated.
A right picture is a dialog box for intermittent braking.
A right picture is a graph of the intermittent braking. Transverse is time, ordinates are velocity and distance. It calculates as follows:
At first, it calculates braking force, and calculates sector time for total distance.
Energies comsumed by air resitance and rolling resistance, potential energy, kinetic nergies both of initial velocity and ending velocity would be calculated and be expressed.
Temperatures and heat values, radiation heats, residual heats both of front and rear brakes would be calculated and be expressed.
In time sequence, points of starting to brake and ending to brake, time and distance, velocity, temperatures, heat values, radiation heats, residual heats both of front and rear brakes.
A right picture is a graph of the intermittent braking. Transverse is time, ordinates are temperatures of front and rear brakes.
It poised after two hundred and dozen seconds elapsed.
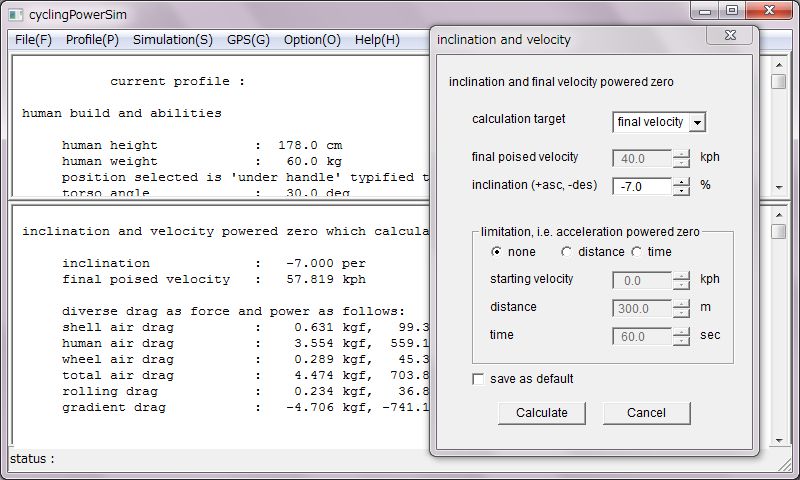
Simulates final poised velocity due to inclination on downslope, and simulates inclination due to final poised velocity.
With limitation of time or distance it simulates not poised velocity but ending velocity.
Case of no limitation, it calculates final poised velocity.
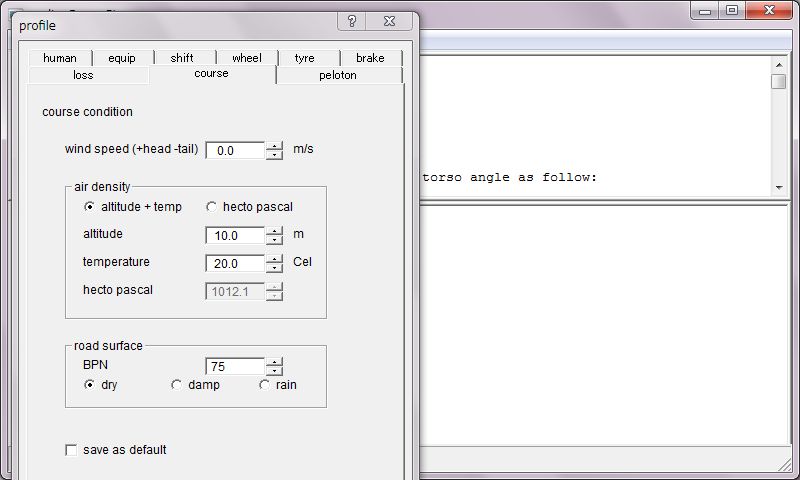
As the condition reached final poised velocity, it calculates air resistance and rolling resistance, gravity resistance. And as the air resistance, shell air resistance and human body air resistance, wheel air resistance would be calculated respectively.
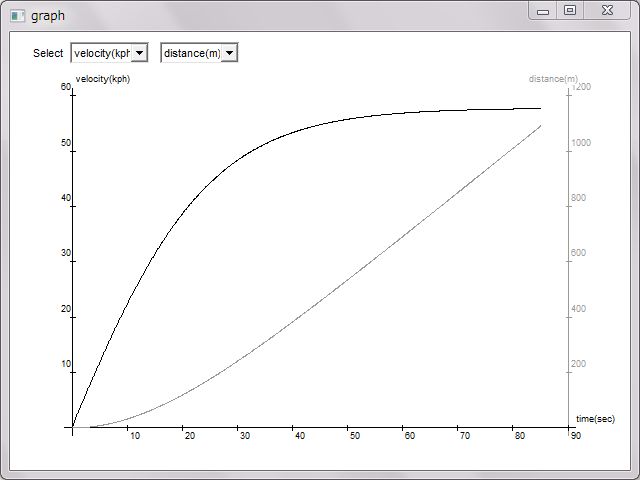
It doesn't express in time sequence but it's confirmed by the graph.
Case of limitation of distance or time, ending velocity and time, distance would be calculated.
And, in time sequence, time and velocity, accel, distance would be calculated and be expressed.
A right picture is a graph of final poised velocity in time sequence without limitation.
Transverse is time, ordinates are velocity and distance.
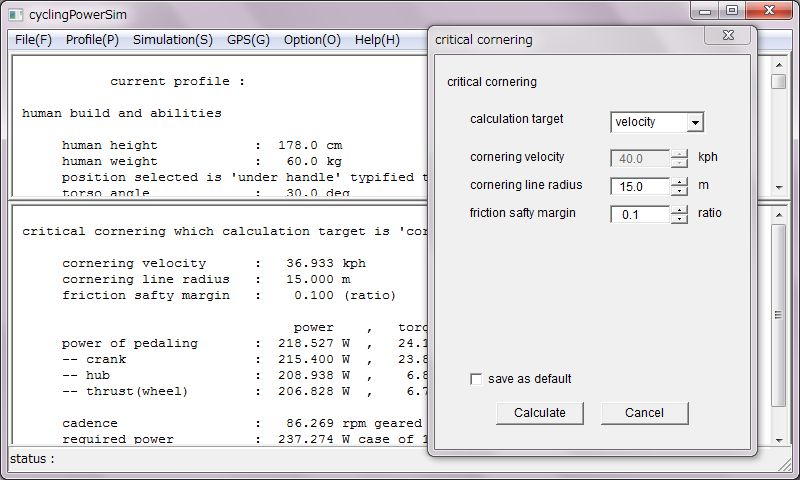
Calculates limit of radius of gyration due to velocity, and calculates limit of velocity due to radius of gyration.
Friction margin could be set as its ratio.
Power and torque, force would be calculated based on pedaling and crank, sprocket, thrust. And cadence and gears, required maximum power would be calculated.
This simulation is not so exactly. Please consider as rough standard.
By the way balance of front and rear is counted as ideal condition, and hysteresis grip is excluded.